Continuamos con los ejemplos de NI Vision Builder, esta vez el trabajo consistirá en comprobar una culata.

Utilizamos la función "Simulate Acquisition" para cargar las imágenes del segundo tutorial con la siguiente ruta:
“C:\Program Files (x86)\National Instruments\Vision Builder AI 2010\DemoImg\Tutorial 2 “ .


Después de darle la ruta vamos a calibrar la imagen desde esta misma función, para ello vamos a la pestaña “Calibration” y clicamos en “Create Calibration”.

Nos posicionamos en la regla que nos sale en la imagen y tomamos dos puntos, en el 0 y en el 50, a la derecha nos dice que eso son 269 pixels y nosotros estableceremos que 269 pixels van a ser 50 mm.

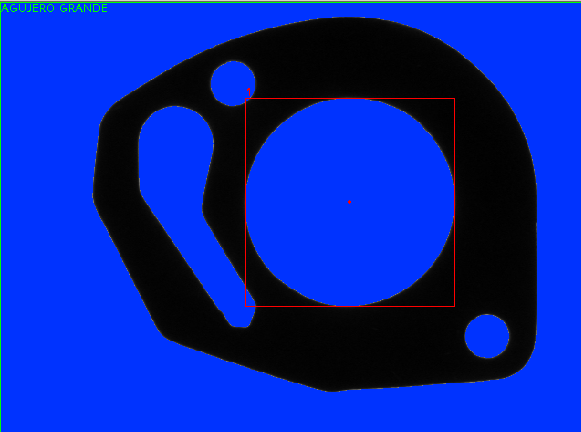
Lo siguiente va a ser buscar los agujeros de la culata con la función “Detect Objets”, esta función la utilizaremos dos veces, una para los agujeros pequeños y otra para los grandes.

Seleccionamos "Full Image" para que busque los agujeros en toda la pantalla.

Vamos a la pestaña “Threshold” y le decimos que busque los objetos blancos y que configuraremos manualmente el cambio de oscuro a claro donde hemos fijado el valor 83.

Le obligamos a encontrar dos agujeros pequeños necesariamente para que sea correcto este apartado.
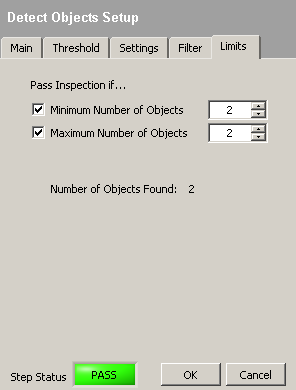

Hacemos exactamente lo mismo con el agujero grande, con la diferencia de que configuraremos la ventana “Limits” con un solo agujero.

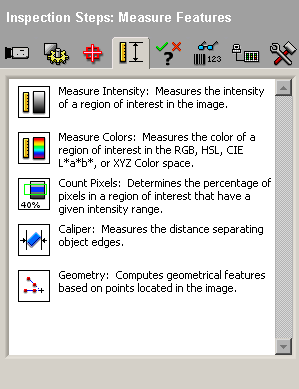
A continuación vamos a mirar las distancias entre agujeros, para hacer esto utilizamos la función “Geometry Setup” dos veces, una para medir la distancia entre el agujero grande y el pequeño superior y otra para medir entre el agujero grande y el pequeño inferior.

Es necesario fijar las tolerancias que damos a las distancias entre agujeros, para ello vamos al apartado “Limits”.
Le decimos que en este caso cualquier medida entre 33 y 34 mm sea correcta.



Los límites en este caso estarán comprendidos entre 38,5 y 40 mm.


Ahora hacemos un análisis booleano a modo de puerta AND con “Logic Calculator” para que no pase la pieza si cualquiera de las dos medidas es incorrecta.

Para finalizar utilizamos la función “Custom Overlay” con un indicador booleano asociado a la resolución AND de las distancias y los datos de dichas distancias.


Para el uso real de una aplicación de NI Vision Builder habría que importarlo a LabVIEW, para ello vamos a “Tools/Migrate Inspection to LabVIEW”.

