En esta entrada vamos a comenzar a trabajar con el software NI Vision Builder, el cual nos permite analizar imágenes almacenadas previamente o tomadas en tiempo real desde una videocámara.
National Instruments nos facilita una serie de ejemplos para mejorar el aprendizaje, el primero que vamos a analizar es la detección de tapas de botes .


Al abrir Vision Builder nos aparecerá una ventana, en ella tenemos que distinguir cuatro partes fundamentales.
En la parte superior derecha nos encontramos con la máquina de estados, en este ejemplo solo va a constar de un estado, las herramientas que vamos a utilizar en cada estado nos van a aparecer en la parte inferior de la ventana.

En la parte inferior derecha de la ventana nos aparecerán las herramientas con las que podemos trabajar y en el centro la imagen que estamos analizando.

Dicho esto, vamos a indicar al programa la ubicación de las imágenes a tratar, para ello clicamos en “Simulate Acquisition”.

Y seleccionamos el directorio.

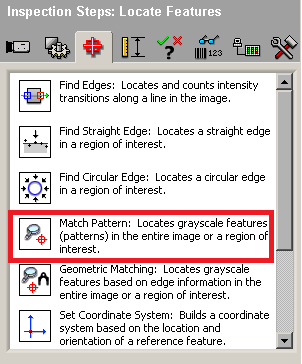
Ahora vamos a tomar una zona de referencia que se repite en todas las imágenes para que el programa se sitúe y pueda comprobar si hay tapa o no.
Para hacer esto utilizamos la herramienta “Match Pattern”.
Seleccionamos toda la imagen para buscar la referencia (rectángulo verde), aunque en este caso podíamos haber seleccionado una franja en la zona inferior de la imagen dado que las imágenes simulan una cinta transportadora y la variación en posición del bote no va a ser muy grande.

En el apartado “Settings” fijaremos el número de referencias que queremos que encuentre, en este caso 1, también el tanto por ciento de coincidencia que queremos que tenga, ponemos 500 sobre 1000 que es un 50%, también vamos a poner un ángulo de giro que permitimos que tenga la imagen para detectarla como buena, en este caso ponemos 5º de rango.

En el apartado “Limits” podemos fijar un límite mínimo y máximo de referencias encontradas.

Fijamos con el rectángulo rojo el área de referencia.

A continuación vamos a establecer unas coordenadas “Set Coordinate System” en la zona de referencia, de esta forma podrá orientarse el programa para saber dónde buscar la tapa.

Lo configuramos como “Horizontal Motion” (Movimiento horizontal).


Ahora fijaremos las zonas en las que vamos a medir la intensidad de tono para saber si hay tapa o no con “Measure Intensity”.

Encuadramos tres zonas en las cuales tomaremos la medida de intensidad.

Establecemos el límite del mínimo en 100, esto significa que habiendo tapa aparecerán colores más oscuros que 100 y será válido, cuando no haya tapa los mínimos estarán cerca de 255 que es el blanco y nos dará error.

Por último vamos a configurar el mensaje de aviso, para ello seleccionamos “Custom Overlay”, lo asociamos a la función ”Measure Intensity” a la cual renombré como “LOCALIZAR TAPA” , hacemos un indicador LED de tipo Booleano que muestre “OK” en verde si hay tapa y “KO” en rojo si no hay.


VÍDEO DEL PROGRAMA
